|
Howdy! I'm a machine learning researcher at Amazon AGI, where I work on Reinforcement Learning post-training for the Nova family of foundation models. Previously, I was a machine learning researcher at Zoox, where I led RL post-training of VLMs for autonomy applications. I received my Ph.D. from The University of Texas at Austin, specializing in Reinforcement Learning, Self-Supervised Learning, and Artificial Intelligence for Robotics. I was advised by Peter Stone and was affiliated with the Learning Agents Research Group (LARG) in the UT Austin Computer Science department. In my past life, I worked with Dr. Robert Skelton at Texas A&M University, College Station, on state estimation and control of Tensegrity robots. Email / Biography / Google Scholar / LinkedIn |

|
|
|
|
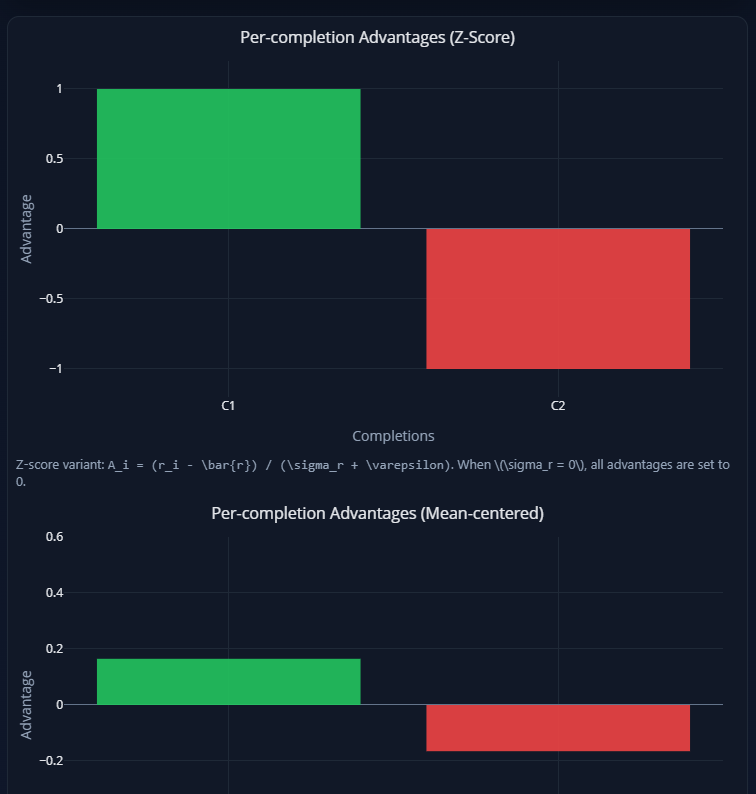
Interactive tool (vibe-coded with GPT5!) Open tool Interactively explore per-completion advantages used in GRPO. Adjust rewards and compare Z-score vs mean-centered variants with live plots. |
|
|
|
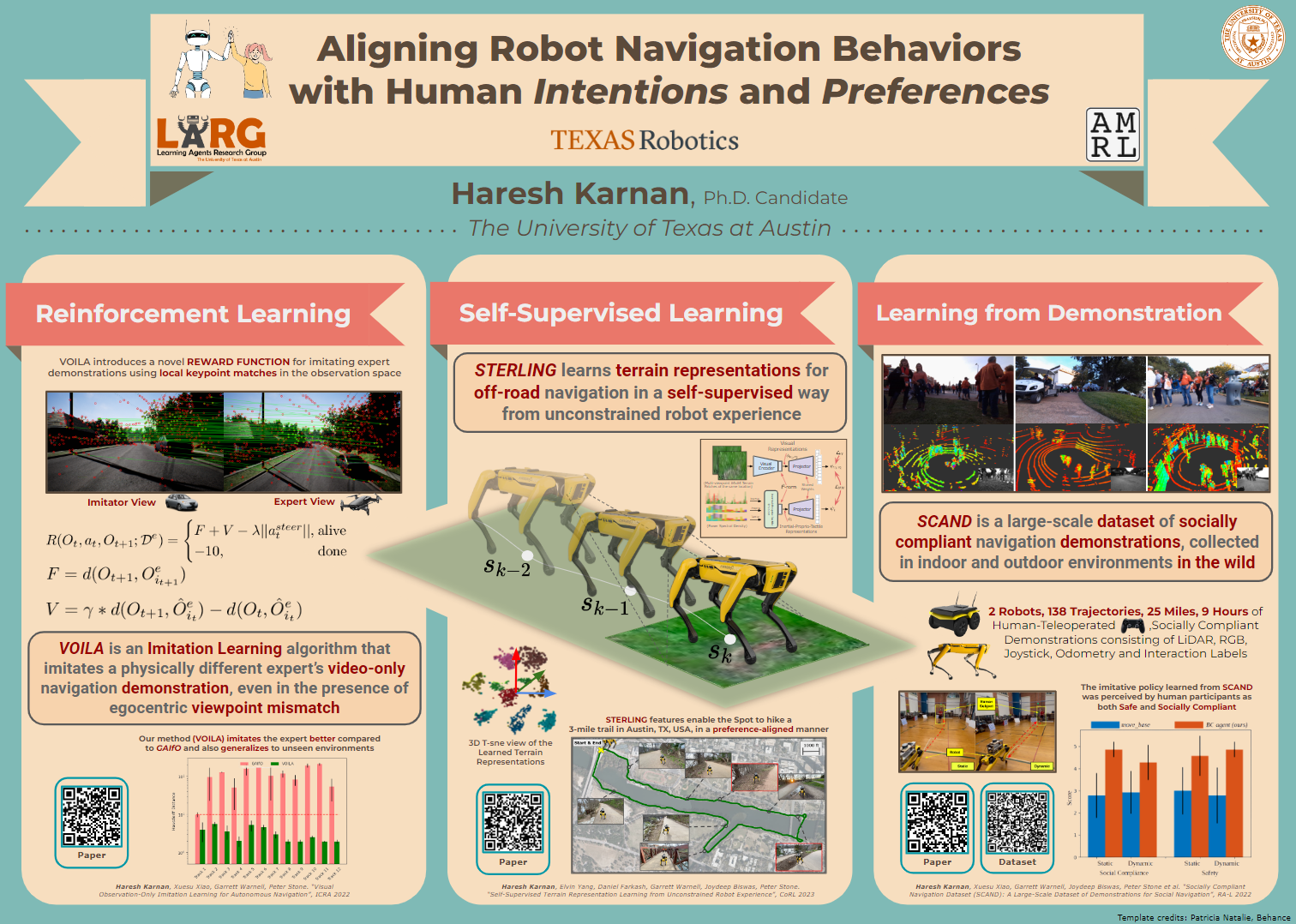
Haresh Karnan PhD Dissertation, The University of Texas at Austin, 2024 Repository Link This dissertation addresses value misalignment in autonomous navigation by developing methods that ensure robot behaviors align with human intentions and preferences. It introduces novel techniques for imitation learning from demonstrations, self-supervised terrain representation learning for off-road navigation, and socially compliant navigation in human-occupied spaces, enabling robots to operate autonomously while respecting human values. |
|
Haresh Karnan, Elvin Yang, Garrett Warnell, Joydeep Biswas, Peter Stone International Conference on Robotics and Automation (ICRA), 2024 Paper / Video / Poster / Robot Deployment Robots navigating off-road environments typically require additional human feedback to learn operator preferences for visually novel terrains. In this work, we introduce a framework to extrapolate operator preferences from known terrains by leveraging multi-modality. |

|
Amir Hossain Raj, Zichao Hu, Haresh Karnan, Rohan Chandra, Amirezza Payandeh, Luisa Mao, Peter Stone, Joydeep Biswas, Xuesu Xiao International Conference on Robotics and Automation (ICRA), 2024 Paper / Video In this work, we challenge the prevailing shift towards solely utilizing learning-based approaches for robot navigation in social contexts, advocating instead for a hybrid approach that toggles between classical and learning-based motion planners. |

|
Haresh Karnan, Elvin Yang, Daniel Farkash, Garrett Warnell, Joydeep Biswas, Peter Stone Conference on Robot Learning (CoRL), 2023 Project Page / Paper / Video / Robot Deployment / Poster / Code Visual terrain awareness is crucial for autonomous off-road navigation. We propose a novel way to learn relevant terrain representations from unconstrained, multi-modal robot experience collected with any policy. We show how such learned representations enable aligning off-road navigation behaviors with human operator preferences. |

|
IEEE Robotics and Automation Letters (IEEE RA-L) , 2022 Paper / Short Video / Long Video / Poster / Dataset We introduce a large-scale, first-person-view dataset of socially compliant robot navigation demonstrations. SCAND consists of 138 trajectories, 25 miles of socially compliant navigation demonstrations collected on 2 robots by 4 human demonstrators within the UT Austin campus. |

|
Haresh Karnan, Kavan Singh Sikand, Pranav Atreya, Sadegh Rabiee, Xuesu Xiao, Garrett Warnell, Joydeep Biswas, Peter Stone International Conference on Intelligent Robots and Systems (IROS) , 2022 Paper / Video We introduce VI-IKD, a visual-inertial IKD model that learns to anticipate the kinodynamic interactions of the vehicle with the terrain ahead, enabling accurate high-speed navigation. |

|
International Conference on Intelligent Robots and Systems (IROS) , 2022 Paper / Video In this work, we introduce Optim-FKD, an approach for high-speed navigation that uses a learned forward kinodynamics model (FKD) coupled with non-linear least squares optimization for multi-horizon control. |

|
Robotics and Automation Magazine (RA-M) , 2022 Paper Won the 1st place in BARN Challenge @ ICRA 2022 |

|
Haresh Karnan, Garrett Warnell, Xuesu Xiao, Peter Stone International Conference on Robotics and Automation (ICRA), 2022 Paper / Video / Poster Imitating an expert's video-only demonstration can be challenging in the presence of egocentric viewpoint mismatch. In VOILA, we introduce a unique viewpoint-invariant reward function to effectively imitate demonstrations on a physically different agent. |
|
Haresh Karnan, Garrett Warnell, Faraz Torabi, Peter Stone International Conference on Robotics and Automation (ICRA), 2022 Paper / Video / Poster SOTA approaches in Imitation from Video-only demonstrations exhibit poor sample efficiency when learning with access to proprioceptive features of the imitator. To tackle this, we introduce VGAIfO-SO, an IfO algorithm that improves sample efficiency through self-supervision. |

|
Josiah Hanna, Siddharth Desai, Haresh Karnan, Garrett Warnell, Peter Stone Springer. Machine Learning, 2021 Paper Sim-to-real is the problem of learning a control policy in an inaccurate simulated world such that the learned policy when transferred to the real-world, performs well. In this article, we explore the proposed black-box Sim-to-Real algorithm GAT, and its extension SGAT. |
|
Siddharth Desai, Ishan Durugkar, Haresh Karnan, Josiah Hanna, Garrett Warnell, Peter Stone Neural Information Processing Systems (NeurIPS), 2020 NeurIPS site / Paper / Poster / arXiv In this work, we propose the GARAT algorithm, which treats the Sim-to-Real problem as an Imitation from Observation (IfO) problem and uses advances in the IfO literature to transfer a control policy from a source domain to a target domain, using Adversarial Imitation Learning. |
|
Haresh Karnan, Siddharth Desai, Josiah Hanna, Garrett Warnell, Peter Stone International Conference on Intelligent Robots and Systems (IROS), 2020 Long Video / Short Video / Paper / Poster / arXiv Real world dynamics are often stochastic and robot simulators have an inaccurate approximation of real world dynamics. In this work, we propose a Sim-to-Real algorithm called SGAT and transfer a Humanoid walk from Simulation to Real world. |
|
Haresh Karnan, Siddharth Desai, Josiah Hanna, Garrett Warnell, Peter Stone International Conference on Intelligent Robots and Systems (IROS), 2020 Long Video / Short Video / Paper / Poster / arXiv In this work, we propose a Sim-to-Real algorithm called RGAT to ground an inaccurate simulator with data from the real world, using Reinforcement Learning. |
|
Haresh Karnan, Raman Goyal, Manoranjan Majji, Robert Skelton, Puneet Singla International Conference on Intelligent Robots and Systems, 2017 Video / Paper Tensegrity mechanisms are known for their minimal-mass and flexible properties. In this work, we propose using vision based sensing for shape control of such soft robotic manipulators. |
|
|
|
Haresh Karnan IPPC: Integrated Planning, Perception and Control Workshop, IROS, 2023 Paper / Poster The research explored in this paper helps address challenges of value alignment in machine learning for robot navigation. It presents new algorithms and a dataset to teach robots navigation behaviors that align with human intentions and preferences. These innovations are applicable in diverse settings, including indoor, outdoor, and human-occupied environments. |
|
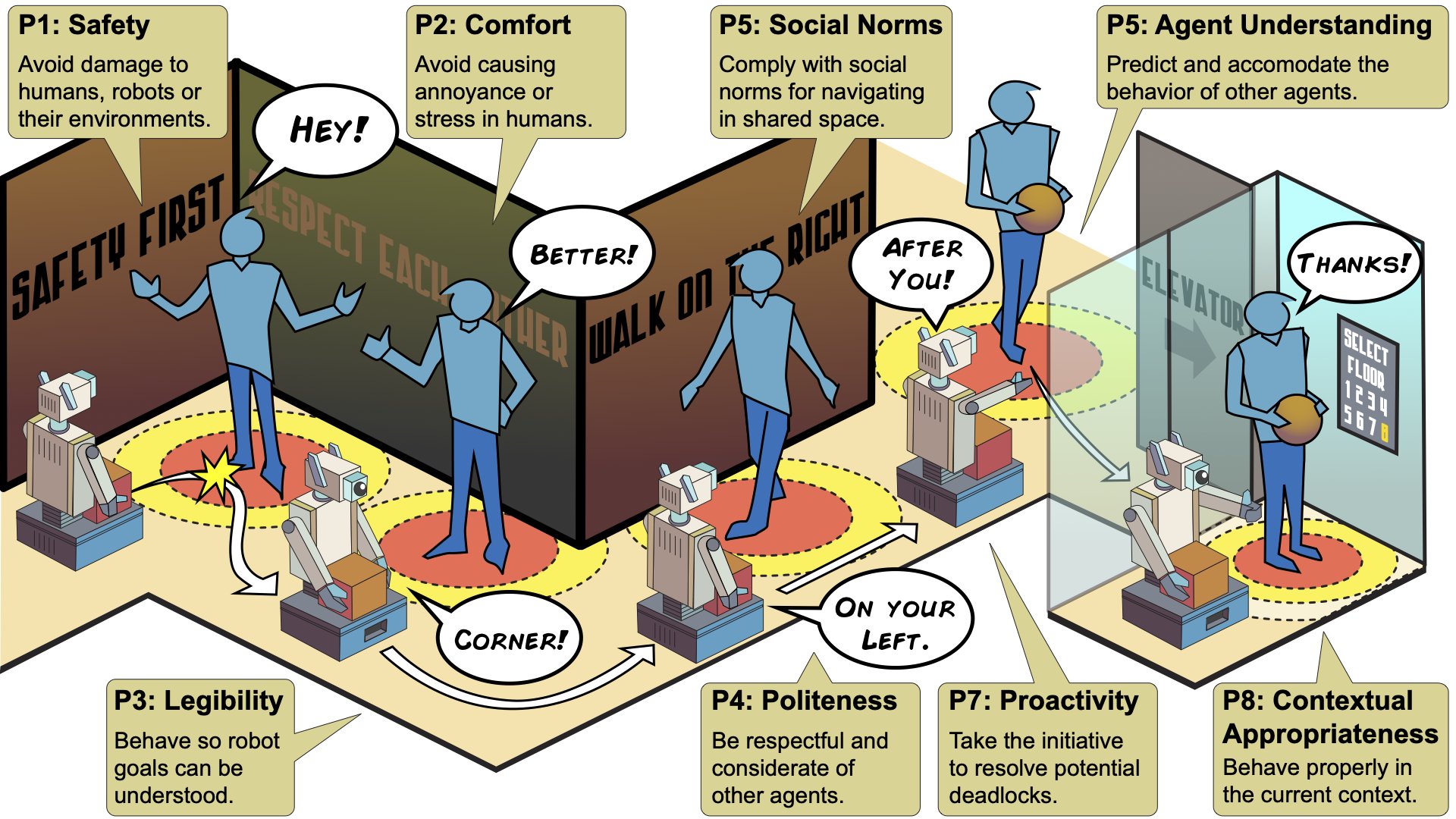
Anthony Francis, Claudia Perez-D'Arpino, Chengshu Li, Fei Xia,..., Haresh Karnan, Peter Stone ArXiv, 2023 Paper We introduce a standardized criteria and a metrics framework for evaluating social robot navigation in human occupied spaces. Key principles include safety, comfort, and social competency. This approach fosters fair algorithm comparison across diverse robots, simulators, and datasets, accelerating progress akin to computer vision and traditional robot navigation. |
|
Anthony Francis, Claudia Perez-D'Arpino, Chengshu Li, Fei Xia, Alexandre Alahi, Aniket Bera, Abhijat Biswas, Joydeep Biswas, Hao-Tien Lewis Chiang, Michael Everett, Sehoon Ha, Justin Hart, Haresh Karnan, Tsang-Wei Edward Lee, Luis J. Manso, Reuth Mirksy, Soren Pirk, Phani Teja Singamaneni, Peter Stone, Ada V. Taylor, Peter Trautman, Nathan Tsoi, Marynel Vazquez, Xuesu Xiao, Peng Xu, Naoki Yokoyama, Roberto Martın-Martın, Alexander Toshev HRI in Academia and Industry, AAAI Spring Symposum, 2023 (Best Paper Award Nominee) Paper |
|
|
Haresh Karnan, Garrett Warnell, Xuesu Xiao, Peter Stone AAAI ML4NAV Spring Symposium, 2021 Talk / Paper |

|
Rishi Shah, Yuqian Jiang, Haresh Karnan, Gilberto Briscoe-Martinez, Dominick Mulder, Ryan Gupta, Rachel Schlossman, Marika Murphy, Justin W. Hart, Luis Sentis, Peter Stone AAAI AI-HRI Symposium, 2019 Video / Paper / arXiv |
|
Siddharth Desai, Ishan Durugkar, Haresh Karnan, Josiah Hanna, Garrett Warnell, Peter Stone Robotics Science and Systems, Sim-to-Real Workshop (RSS), 2020 Video / Paper / Poster In this work, we propose the GARAT algorithm, which treats the Sim-to-Real problem as an Imitation from Observation (IfO) problem and uses advances in the IfO literature to transfer a control policy from a source domain to a target domain, using Adversarial Imitation Learning. |
|
Haresh Karnan, Aritra Biswas, Pranav Vaidik Dhulipala, Jan Dufek, Robin Murphy arXiv preprint, 2017 Paper / arXiv |
|
|
|
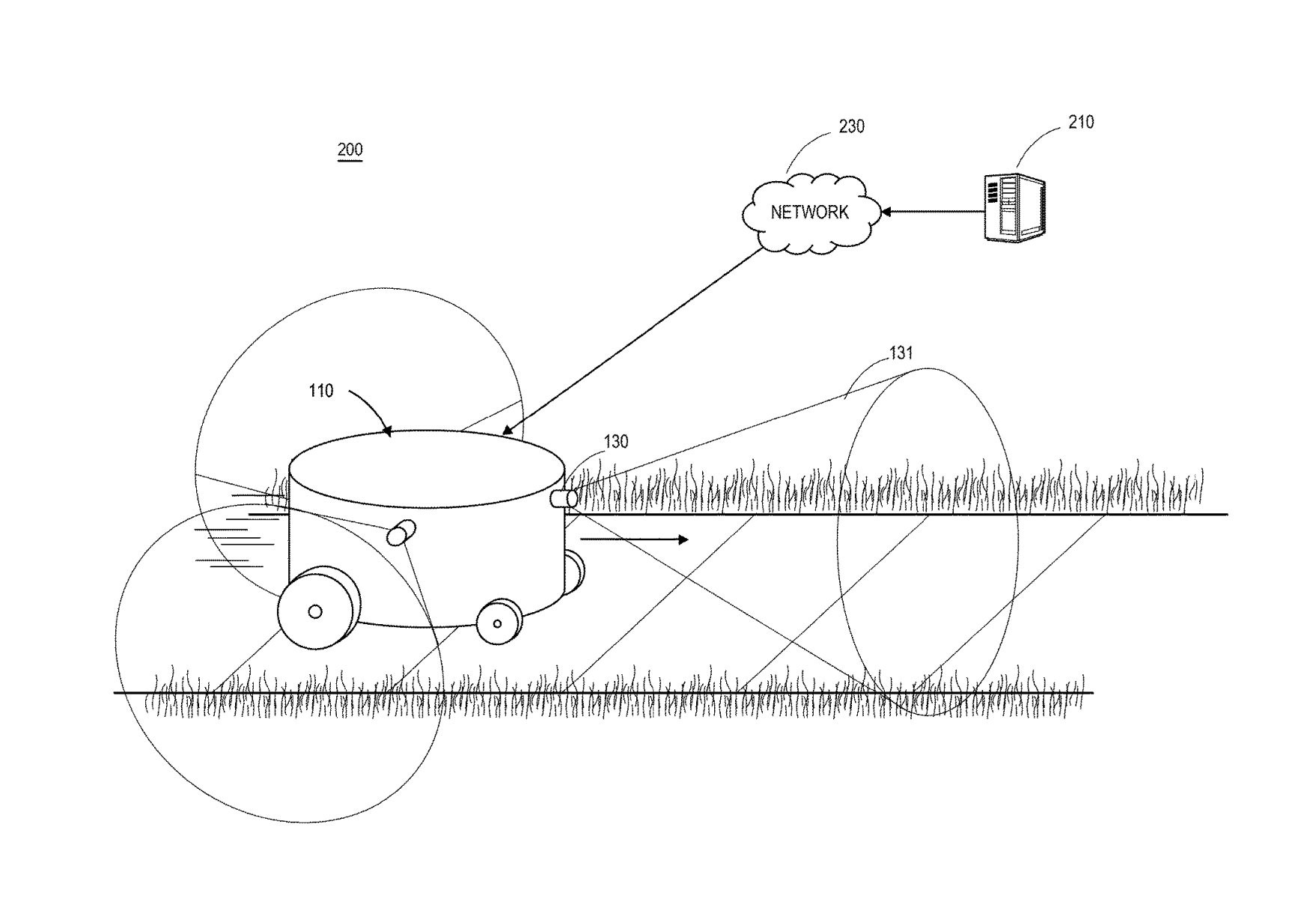
USPTO, US11579622B2, 2021 Google Patents / News Coverage |
|
|